ලේසර් වෙල්ඩින් යනු 1970 ගණන්වල සිට වැදගත් ලේසර් ද්රව්ය සැකසුම් තාක්ෂණයකි.
තාක්ෂණයේ අඛණ්ඩ පරිණතභාවය සහ ලේසර් උපාංගවල මිල පහත වැටීමත් සමඟ විවිධ කර්මාන්තවල ලේසර් වෙල්ඩින් යෝජනා ක්රම වඩාත් පුළුල් ලෙස භාවිතා කර ඇත.

HIGHYAG,TRUMPF වැනි කාර්මික සමාගම් ක්රියාවලි අවශ්යතා අනුව ලේසර් ස්කෑනිං වෙල්ඩින් තාක්ෂණය සහ උපකරණ පර්යේෂණ හා සංවර්ධනය සඳහා ප්රයත්න දරා ඇති අතර කාර්යක්ෂම ලේසර් ස්කෑනිං වෙල්ඩින් පැලෑටි විසඳුම් ලබා ගෙන ඇත.

සාම්ප්රදායික වෙල්ඩින් තාක්ෂණය සමඟ සසඳන විට, ලේසර් ස්කෑනිං වෑල්ඩින්ගේ වඩාත් නිවැරදි හා වඩා කාර්යක්ෂම වාසි සම්පූර්ණයෙන්ම සත්යාපනය කර ඇත.
මේ අතර, කාර්මික විශේෂඥයින් මෙම ක්රියාවලිය තවත් කර්මාන්තවල භාවිතය ප්රවර්ධනය කිරීම සඳහා ලේසර් වෙල්ඩින් යෙදුම් තාක්ෂණය වැඩිදියුණු කිරීම දිගටම කරගෙන යයි.
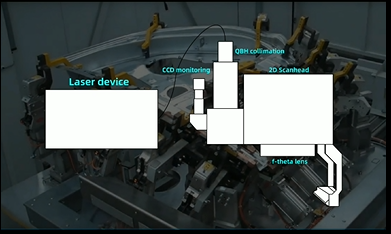
ලේසර් ස්කෑනිං වෙල්ඩින් පද්ධතිවල පොදු කට්ටලයක් මූලික මොඩියුල පහකින් සමන්විත වේ: ලේසර් උපාංගය, QBH collimation, CCD අධීක්ෂණ, ස්කෑන් හිස සහ f-තීටා කාච.
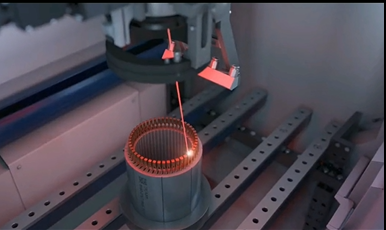
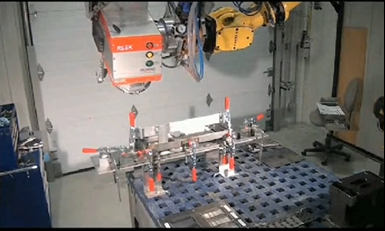
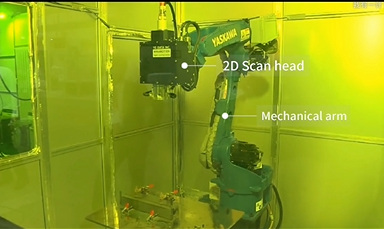
මුල් අවධියේදී, ලේසර් වෑල්ඩින් විසඳුම ප්රධාන වශයෙන් යාන්ත්රික හස්තයක් සමඟ ඒකාබද්ධ වූ 2D ස්කෑන් හිසක් භාවිතා කර, යාන්ත්රික හස්තයේ නම්යශීලී චලනය භාවිතා කරමින් බහු අංශක නිදහසක් සමඟ යන්ත්රෝපකරණ ප්රදේශයේ සියලුම ලක්ෂ්ය වෑල්ඩින් ස්ථාවර නාභීය දුරකින් සාක්ෂාත් කර ගන්නා ලදී. මෝටර් රථ සැහැල්ලු බර ලබා ගැනීම සඳහා මෝටර් රථ ශරීර සහ අමතර කොටස් විශාල වශයෙන් නිෂ්පාදනය කිරීමේදී මෙම විසඳුම බහුලව භාවිතා වේ.
ස්වයංක්රීයකරණය අඛණ්ඩව වැඩිදියුණු වීමත් සමඟ, ලේසර් ස්කෑනිං වෙල්ඩින් තාක්ෂණය භාවිතය කර්මාන්තය තුළ වඩාත් පුළුල් වේ. උදාහරණයක් ලෙස, වේගයෙන් ඉහළ යන නව බලශක්ති වාහන කර්මාන්තය තුළ, වාහන අමතර කොටස්, බල බැටරි සහ අනෙකුත් සංරචක සැකසීමේ නව සැලසුම, එය ඉදිරිපත් කරයි. පවතින විසඳුමට විශාල අභියෝගයක් වන අතර වෑල්ඩින් කිරීමේදී යාන්ත්රික හස්තයේ ආරම්භක-නැවතුම් සංඛ්යාතය සහ ස්ථානගත කිරීමේ නිරවද්යතාවය සඳහා ඉහළ අවශ්යතා ඉදිරිපත් කරයි.
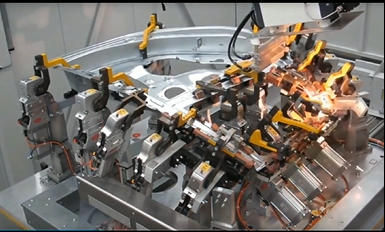
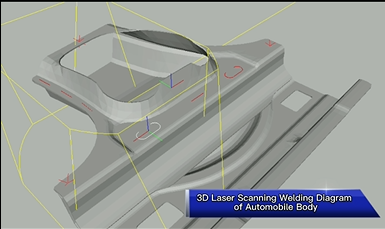
විශාල සංකීර්ණ පෘෂ්ඨ සංරචකයක් මත අධිවේගී ලේසර් වෑල්ඩින් ලබා ගන්නේ කෙසේද? විවිධ වැඩ උස යටතේ ඉක්මන් නාභීය දුර ගැලපීම සාක්ෂාත් කර ගන්නේ කෙසේද? මේ සියල්ල දුෂ්කර වෙල්ඩින් ක්රියාවලිය උත්ශ්රේණි කිරීම බවට පත්ව ඇත.
අපට ලේසර් ස්කෑනිං වෙල්ඩින් පද්ධති උපකරණවල 2D ස්කෑන් හිස ත්රිමාණ ගතික නාභිගත පද්ධතියකට යාවත්කාලීන කළ හැකිය, ගතික නාභිගත පද්ධතියේ Z-දිශා ගතික අක්ෂය XY අක්ෂය සමඟ සහයෝගයෙන් කටයුතු කළ හැකිය.වෙල්ඩින් ක්රියාවලියේදී වැඩ කරන දුර වෙනස් වන විට, Z-දිශාගත ගතික අක්ෂය නාභිගත වන්දි ලබා දීම සඳහා ඉදිරියට සහ පසුපසට ගමන් කරයි, එය සමස්ත ක්රියාකාරී ක්රියාවලියේ ස්ථාන නාභිගත කිරීමේ අනුකූලතාව සහතික කළ හැකි අතර, අධිවේගී ඒකාබද්ධ වෑල්ඩින් අවබෝධ කර ගත හැකිය. සංකීර්ණ මතුපිට කොටස් විශාල පරාසයක්, සහ රොබෝ අතෙහි ස්ථානගත කිරීමේ කාලය සහ නිෂ්පාදනයේ පියවරේ කාලය බෙහෙවින් අඩු කරයි.
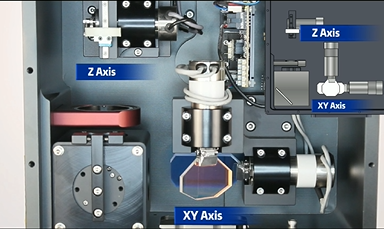
ඒ අතරම, යාන්ත්රික හස්තයේ නිරන්තර ආරම්භය සහ නැවතුම නිසා ඇතිවන ස්ථානගත කිරීමේ දෝෂය අඩු කිරීම සඳහා, Z-දිශා ගතික අක්ෂය සහ ගතිකයේ XY අක්ෂය අතර සම්පූර්ණ සම්බන්ධීකරණය හරහා විවිධ උසවල වේගවත් නාභිගත ගැලපීම සාක්ෂාත් කරගත හැකිය. නාභිගත කිරීමේ පද්ධතිය, සහ වෙල්ඩින් වැඩ අවසන් කරන්න. කාර්යක්ෂමතාව බෙහෙවින් වැඩි දියුණු කර ඇත, නිෂ්පාදන මාර්ග ස්වයංක්රීයකරණය ලබා ගැනීමට පහසුය.
FEELTEK TECHNOLOGY නාලිකාවෙන් වැඩි විස්තර දැනගන්න
පසු කාලය: සැප්-23-2022